
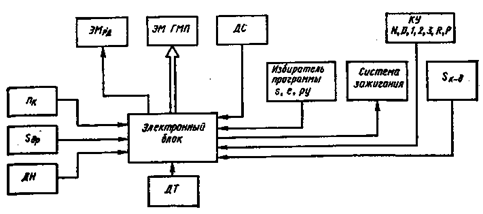
Рисунок 9. Структурная схема микропроцессорной системы управления ГМП
Использование микропроцессорной системы управления ГМП обеспечивает переключение передач при скоростях движения автомобиля, отличающихся не более чем на 1 % от их оптимальных значений. При применении гидравлической системы управления допуск скоростей, соответствующих переключению передач, составляет 5 — 10%.
Сравнительные испытания ГМП с гидравлической и микропроцессорной системами управления показали, что применение последней позволяет экономить до 7 — 8 % топлива.
Система управления АТЕС выполняет следующие защитные функции:
предотвращает возможность включения передачи заднего хода при скорости движения выше установленного предела;
запрещает переключений передач в случае пробуксовывания или блокировки колес автомобиля при торможении, благодаря чему исключается ошибочное действие системы управления;
предотвращает чрезмерное увеличение частоты вращения коленчатого вала при спуске с горы с включенным замедлителем.
Рисунок 10. Электронный блок микропроцессорной системы управления ГМП и электромагнитные клапаны
Кроме того, система управления,- будучи связанной с встроенными устройствами диагностирования, не только сигнализирует водителю о наличии каких-либо неисправностей или отклонении показателей ГМП от нормы (перегрев масла или недопустимое изменение давления в гидросистеме), но и записывает в памяти эти данные для последующего анализа причин появления неисправностей.
Микропроцессорная система управления для четырехступенчатой планетарной ГМП типа 4НР22 [39] предназначена для применения в легковых автомобилях (БВМ) большого класса. Структурная схема ее представлена на рисунке 9, а электронный блок на рисунке 10.
Режим автоматического переключения передач реализуется при установке контроллера управления KУ в положение D. При этом в зависимости от положения избирателя программ, заранее устанавливаемого водителем в то или иное положение, обеспечивается переключение передач по программе е, соответствующей наилучшей топливной экономичности или по программе s, позволяющей реализовать наивысшие динамические показатели автомобиля.
При переключении передач по программе s четвертая передача не включается. Данный режим переключения используют при эксплуатации автомобиля в горных условиях или при движении с прицепом.
Установка избирателя программ в положение ру (ручное управление) обеспечивает отключение автоматики, что позволяет водителю с помощью контроллера управления принудительно включать первую — третью передачи переднего хода, а также передачу заднего хода (рисунок 9, положение R). Положение Р контроллера используется для механического соединения ведущего вала 1МП с картером для обеспечения затормаживания неподвижного автомобиля во время стоянок.
Электронный блок выполняет следующие функции управления:
вырабатывает команды на переключение ступеней передачи и блокировку гидротрансформатора в зависимости от скорости автомобиля и нагрузки двигателя путем подключения к источнику электропитания электромагнитов ЭМ ГМП привода гидравлических клапанов управления тормозами ГМП;
воздействует на электронную систему зажигания двигателя для уменьшения крутящего момента двигателя, что позволяет снизить нагрузки в трансмиссии автомобиля и увеличить плавность процесса переключения в период переключения передач. Тем самым обеспечивается уменьшение работы буксования фрикционных элементов системы управления ГМП;
Проблемы трамвайного транспорта и пути их решения
Анализируя выше перечисленные особенности, мы выделили следующие проблемы, характерные для развития трамвайного транспорта и попытались найти пути решения данных проблем: 1. Трамвайный транспорт в России рассматривается как устаревший и стагнирующий вид транспорта. Одной из причин разрушения трамва ...
Определение потребного количества погрузочно-разгрузочных машин
Определим время цикла операции по формуле: , (9) где ,с - время застропки и отстропки груза [6]; =5с - время установки захватного устройства над полувагоном[6]; =15с - время установки захватного устройства над площадкой [6]; =0,75 - коэффициент совмещения операций[6]; - время подъема или опускания ...
Расчет годовой трудоёмкости работ на участке
Годовой объем работ рассчитывается по формуле: Тг=t∙n∙N∙Кмр, где t – трудоемкость на единицу продукции, чел.-ч.; n – число одноименных деталей в изделии, шт. n = 1; N – годовая программа. N = 6000 автомашин в год; Кмр – маршрутный коэффициент ремонта. Кмр = 1,04. Норма трудоёмкост ...


