
Основной задачей системы управления является регулирование по заданному закону момента Мс в зависимости от угла открытия дроссельной заслонки, частоты вращения коленчатого вала, его ускорения .(замедления) и включения в коробке передач той или иной передачи.
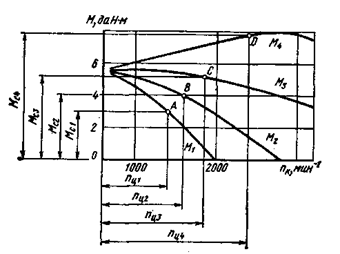
Зависимости M=f(nК) и Mc=f(nK) для различных а при микропроцессорной системе управления сцеплением
В зависимости от угла открытия дроссельной заслонки микропроцессор рассчитывает «целевую» частоту вращения пц, которая тем выше, чем на больший угол а открыта дроссельная заслонка (рисунок 5). Система управления непрерывно сравнивает значение nЦ с текущей частотой вращения nKi коленчатого вала и определяет знак разности nKi — nц. Если пц>пкi, то система управления уменьшает момент Мс для того, чтобы снизить нагрузку на двигатель и увеличить частоту вращения пк. Наоборот, при пц<пкi значение Мс увеличивается и частота вращения пк снижается.
Таким образом, в рассматриваемой системе управления параметром обратной связи для системы регулирования момента Мс является разность между истинной и целевой частотами вращения, причем последняя является функцией угла открытия дроссельной заслонки.
Особенность действия системы управления заключается в том, что при постоянстве угла открытия дроссельной заслонки процесс разгона автомобиля в период до окончания пробуксовывания сцепления будет протекать при постоянстве частоты вращения коленчатого вала, которая окажется равной значению пц для данного угла открытия заслонки. Величины моментов Мс в указанные периоды (рисунок 6, точки А, В, С и D) будут равны крутящим моментам двигателя М, развиваемым при данных значениях угла а и пц.
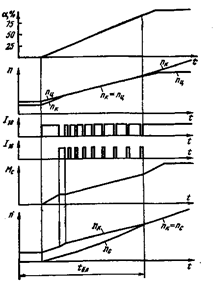
Изменение при разгоне автомобиля угла а, частот вращения пк, nц и nс, момента Мс я силы тока I16 и I18 в обмотках электромагнитов управления воздушным и вакуумным клапанами при микропроцессорной системе управления
Момент Мс возрастает по мере увеличения пк, т. е. в конечном итоге рассматриваемая система управления обеспечивает получение именно такой зависимости Mс=f(nк), которая является оптимальной для автоматизации действия сцепления. После окончания пробуксовывания сцепления, определяемого системой управления путем сравнения сигналов от датчиков 2 и 6 (рисунок 2), поступает команда на блокировку сцепления при t=tбл (рисунок 7). Благодаря этому уменьшается износ узлов привода сцепления и, в первую очередь, его выжимного подшипника.
Ввиду неизбежного запаздывания в срабатывании исполнительных механизмов по отношению к изменению частоты вращения коленчатого вала для получения качественного процесса регулирования момента Мс необходимо исключить режимы работы двигателя без нагрузки, поскольку это приведет к чрезмерно высокому темпу изменения частоты вращения его вала.
Для удовлетворения данного требования в системе управления предусмотрено частичное включение сцепления, как только водитель откроет дроссельную заслонку на небольшой угол. Это достигается путем принудительного кратковременного открытия клапана 17 (рисунок 2) на 0,15 с несмотря на то, что в данный период nк<nц. В результате последующее увеличение пк будет происходить при наличии нагрузки на двигателе, создаваемой частично включенным сцеплением.
Для плавного изменения момента Мс при его регулировании, осуществляемом открытием и закрытием клапанов 15 и 17, должны быть исключены значительные колебания разрежения в полости 19 сервокамеры 20. В рассматриваемой системе управления это достигается вследствие непрерывно повторяющегося открытия и закрытия на короткие периоды данных клапанов. При этом увеличение момента Мс реализуется за счет того, что общая продолжительность открытого состояния клапана 17 оказывается больше общей продолжительности открытого состояния клапана 15. Если же необходимо уменьшить момент Мс, то это обеспечивается вследствие увеличения общей продолжительности открытого состояния клапана 15 (по сравнению с клапаном 17). После того как значение Мс устанавливается на заданном уровне, оба клапана закрываются.
Расчет и построение внешней скоростной характеристики двигателя
С некоторой долей погрешности внешняя скоростная характеристика может быть определена и построена для четырехтактных двигателей с искровым зажиганием на основании следующих данных: Таблица 1 - Мощностные характеристики автомобиля при разных условиях рабочей нагрузки n % 20 40 60 80 100 120 n об/мин ...
Схема цепей управления ГВ
Схема питания удерживающей катушки выключателя ВВ-У и промежуточного реле ПВВ1 на электропоездах ЭР9Е представлена на рис.1. Здесь в отличие от схемы электропоезда ЭР9М катушки ВБ-У, ПВВ1 и РОП получают дополнительное питание от провода 56 (плюс аккумуляторной батареи). Тем самым исключено самопрои ...
Тяговый трансформатор и реакторы
До начала работ закорачивают выводы вторичной обмотки трансформатора. Фарфоровые изоляторы, имеющие сколы или повреждения глазури на длине свыше 15 % длины возможного перекрытия дугой, трещины или ослабление армировки металлических стержней, заменяют. Места повреждения глазури на меньшей длине прот ...


