
В рулевой привод входят все детали, передающие усилие от рулевого механизма к управляемым колесам. Конструкции рулевых приводов отличаются большим разнообразием и определяются типом автомобиля, схемой поворота и условиями компоновки.
Рулевой привод оценивается передаточными числами и КПД.
Кинематическое передаточное число uпк равно отношению элементарного угла поворота сошки dφ к полусумме элементарных углов поворота цапф управляемых колес. Для автомобиля с двумя управляемыми колесами
uпк = 2*dφ/(dθл +dθп),
где θл и θп – углы поворота соответственно левой и правой цапф.
Силовое передаточное число uпс определяется как отношение суммарного момента МΣ на поворотных цапфах всех управляемых колес к моменту Мс на сошке. Для автомобиля с двумя управляемыми колесами
uпс = MΣ/Мс
Передаточные числа привода – переменные вследствие изменения соотношения плеч рычагов. Кроме того, из-за несимметричности привода эти числа могут быть различными при повороте автомобиля вправо и влево. Следовательно, будет переменным и усилие на рулевом колесе в процессе поворота.
Отношение силового передаточного числа к кинематическому соответствует КПД привода ηп = uпс / uпк
Рулевая трапеция является частью рулевого привода и обеспечивает требуемую зависимость между углами поворота управляемых колес. Рулевую трапецию обычно располагают сзади управляемых колес. В этом случае она хорошо защищена поперечиной подвески или балкой моста от повреждений
По конструктивным признакам рулевая трапеция разделяется на два типа: цельную (см. рис.9) и расчлененную (см. рис. 10).
По расположению относительно передней оси рулевая трапеция разделяется на переднюю и заднюю.
Автомобили с зависимой подвеской имеют неразрезную поперечную тягу
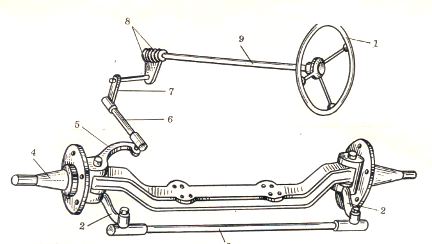
Рис. 9 Схема РУ с зависимой подвеской
При независимой подвеске эта тяга выполняется разрезной (рис.10), состоящей из двух или трех звеньев, что обеспечивает возможность независимого перемещения управляемых колес. Для регулирования схождения колес тяги имеют резьбовые наконечники. Целесообразно выполнять один наконечник с правой резьбой, другой – с левой. Тогда регулировка схождения производится простым вращением тяги 2.
Рулевой привод должен быть жестким, обеспечивать кинематику поворота управляемых колес и отсутствие зазоров в шарнирных соединениях. Недостаточная жесткость привода приводит к нарушению схождения управляемых колес и увеличению их склонности к автоколебаниям. Следствием этого является интенсивное изнашивание шин и повышенный расход топлива, ухудшение устойчивости движения автомобиля. Жесткость РП автомобилей с зависимой подвеской примерно в 1.5…2 раза выше, чем у аналогичных по классу автомобилей с независимой подвеской. Правильная кинематика поворота управляемых колес обеспечивается соответствующим выбором параметров рулевой трапеции, а отсутствие зазоров в приводе – использованием шарниров с автоматическим устранением зазоров.
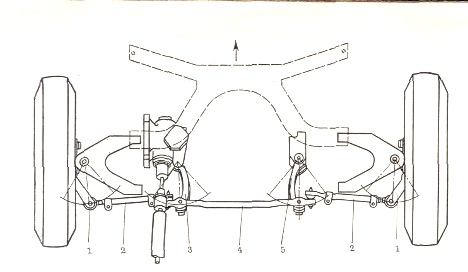
Рис.10 Рулевое управление автомобилей с независимой подвеской
Шарниры рулевого привода по способу устранения зазора выполняют соморегулируемыми, с периодической регулировкой и нерегулируемыми.
Саморегулируемые шарниры ( рис.11 а…ж) не требуют регулировки в процессе эксплуатации. Зазор в шарнирах автоматически выбирается перемещением сухарей 3 или пальцев 2 по конусным направляющим поверхностям наконечника под действием поджимной пружины 1. Ее предварительный натяг составляет 250…500 Н и должен быть больше максимальной инерционной силы, возникающей при действии на тягу вертикальных ускорений во время движения автомобиля по неровной дороге. Такие шарниры устанавливаются обычно на поперечных рулевых тягах.
В шарнирах с периодической регулировкой (рис.11з, и) зазор, появляющийся вследствие изнашивания трущихся поверхностей, устраняется наворачиванием пробки 4 до упора и отпусканием ее до ближайшего положения, в котором ее можно зашплинтовать. Шарниры с периодической регулировкой обычно используются в продольных рулевых тягах.
Нерегулируемые шарниры (рис.11 к) применяют на автомобилях, в которых колеса поворачиваются вокруг вертикальной оси. Эти шарниры имеют меньшую долговечность. В случае предельного износа трущихся поверхностей нерегулируемый шарнир заменяется.
Пальцы 2 рассмотренных шарниров выполняют шаровыми полносферными (рис.11 д…и) или двухсферными (рис.11 а, б), коническими (рис.11 в, г) или цилиндрическими (рис.11к) . В двухсферных пальцах полусфера большего радиуса является рабочей, а меньшего – направляющей. По кинематике шарниры могут быть простыми и сложными. В первом случае палец поворачивается в наконечнике за счет скольжения сферы пальца относительно поверхностей сухарей 3. Во втором случае при повороте пальца 2 вокруг своей оси его сфера скользит в сухарях, а при угловых колебаниях пальца сухари скользят по направляющим головки наконечника.
Порядок заполнения и кодирования карточки учёта дорожно-транспортного происшествия
Карточка заполняется работником подразделения ГИБДД, оформляющим материалы по ДТП. Заполнение позиций производится непосредственно текстом (где это предусмотрено) и проставлением отметок у соответствующего значения показателя. Заполненная Карточка (в двух экземплярах) подписывается главным государс ...
Организация работы МПРВ
При поступлении вагонов в отцепочный ремонт их осматривают и затем устраняют все обнаруженные неисправности. Необходимому ремонту подвергают основные узлы вагона, такие, как кузов и рама вагона, тележки с колесными парами и буксовыми узлами, автосцепные устройства, тормозное оборудование. При выпол ...
Выбор гидроцилиндра для основной стрелы Схема к определению
усилия на штоке
Определим ход поршня. Ориентируясь на параметры механизмов подъема сельскохозяйственных погрузчиков, примем r = 710 мм: a=arccos(H0/R) (3.2) где Но - расстояние от земли до точки соединения основной стрелы с платформой; R - длина стрелы основной и передней вместе. Расстояние между опорами гидроцили ...


