
По сравнению с электронными системами управления микропроцессорные системы имеют следующие преимущества:
с их помощью возможна реализация алгоритма управления любой сложности. При этом может быть учтено большое количество внешних параметров (помимо традиционно принимаемых во внимание частот вращения вала двигателя, выходного вала трансмиссии и нагрузки двигателя) таких, например, как производные этих параметров по времени, температурный режим двигателя, температура масла, полная масса автомобиля и т. д. Возникающие при этом трудности связаны лишь с необходимостью введения дополнительных датчиков и преобразователей;
при необходимости обеспечивается корректирование алгоритма управления как при развитии системы, так и в рамках существующей системы с учетом, например, таких факторов, как изменение характеристик агрегатов вследствие их изнашивания. Следовательно, возможно создание адаптивных систем управления, которые способны изменять свои характеристики в процессе эксплуатации автомобиля с целью обеспечения его наилучших показателей. Для достижения такого эффекта не требуется изменения аппаратурной части системы;
вследствие реализации широких возможностей микропроцессорных систем возможно создание комплексной системы управления агрегатами автомобиля (например, двигателем, сцеплением, коробкой передач);
система управления на базе микропроцессорного комплекта или однокристальной ЭВМ требует минимального объема настройки и регулировок, поскольку они необходимы только для таких вспомогательных элементов системы, как ПЧН, ЦАП и АЦП.
Основными недостатками микропроцессорных систем являются:
относительно высокая стоимость системы вследствие необходимости ее комплектования рядом вспомогательных элементов, из числа которых наиболее дорогостоящими являются устройства ввода-вывода информации. Кроме того, значительная часть расходов по созданию микропроцессорных систем управления приходится на разработку их математического обеспечения;
чувствительность к помехам, которые могут вызывать сбои в работе системы. Это особенно важно для автомобильных микропроцессорных систем управления, поскольку работа агрегатов автомобиля сопровождается значительными помехами в его бортовой сети, а также полевыми (электромагнитными) помехами. Для устранения этого недостатка в настоящее время большое внимание уделяется разработке помехоустойчивых алгоритмов, т. е. таких, которые способны восстанавливать свою работу после непредвиденных сбоев.
Непрерывное совершенствование технологии производства электронных приборов, в том числе элементов микропроцессорных систем управления, обусловливает снижение их стоимости и создает благоприятные предпосылки для расширения их применения. Однако микропроцессорные системы целесообразно использовать в первую очередь для систем управления агрегатами автомобиля со сложными алгоритмами. К таким системам следует отнести антиблокировочные системы управления тормозными механизмами, системы управления гидромеханическими и автоматизированными механическими передачами и, конечно, комплексные системы управления несколькими агрегатами.
Одной из основных проблем создания микропроцессорных систем является разработка и реализация оптимального алгоритма управления. Многие различные микропроцессорные системы отличаются одна от другой в основном составом датчиков и видом алгоритма функционирования, который зависит от целевого назначения системы и сложности решаемых ею задач.
Рассмотрим микропроцессорную систему, разработанную для легкового автомобиля «Фиат — Панда 30». Исполнительным механизмом системы (рисунок 2) является вакуумная сервокамера 20, шток 21 которой через рычаг 22 воздействует на выжимной подшипник 4 сцепления 5. Источником разрежения для вакуумной сервокамеры является впускной коллектор 7 двигателя, соединенный через обратный клапан 13 с вакуумным ресивером 14.
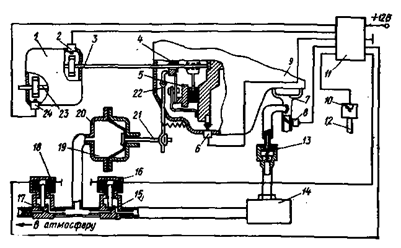
Схема размещения элементов микропроцессорной системы управления сцеплением:
1 — коробка передач; 2 — датчик частоты вращения ведомого элемента сцепления; 3 — вал ведомого элемента сцепления; 4 — выжимной подшипник; 5 — сцепление; 6 — датчик частоты вращения коленчатого вала; 7 — впускной коллектор двигателя; 8 — датчик положения дроссельной заслонки; 9 — двигатель; 10 — выключатель рычага переключения передач; 11 — электронный блок управления; 12 — рычаг переключения передач; 13 — обратный клапан; 14 — вакуумный ресивер; 15 — клапан соединения сервокамеры с ресивером; 16 и 18 — электромагниты; 17 — клапан соединения сервокамеры с атмосферой; 19 — полость регулируемого давления сервокамеры; 20 — сервокамера; 21 — шток сервокамеры; 22 — рычаг; 23 — ведомый вал коробки передач; 24 — датчик частоты вращения ведомого вала коробки передач
Расчет и построение экономической характеристики автомобиля
двигатель передача автомобиль модификация Экономическая характеристика показывает, сколько топлива расходуется на единицу длины пробега автомобиля при его равномерном движении на разных скоростях и в различных дорожных условиях. Топливную экономичность автомобиля принято оценивать расходом топлива ...
Расчёт магнитных напряжений участков магнитной цепи
Воздушный зазор Магнитная индукция в воздушном зазоре Тл. Магнитное сопротивление воздушного зазора , где kδ – коэффициент учитывающий зубчатое строение якоря; – эквивалентный воздушный зазор; , см. Принимаем = 0,35 см. , где t1 – зубцовое деление, см; bz1 – ширина зубца на поверхности якоря; ...
Понятие, виды и
содержание технических регламентов
Согласно статье 2 ФЗ «О техническом регулировании» технический регламент - документ, который принят международным договором Российской Федерации, ратифицированным в порядке, установленном законодательством Российской Федерации, или федеральным законом, или указом Президента Российской Федерации, ил ...


