
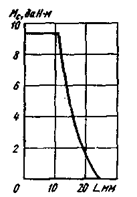
Рисунок 3. Зависимость Mc = f(L)
При подключении к источнику питания электромагнита 16 открывается управляемый им вакуумный клапан 15, в результате чего вакуумный ресивер соединяется с полостью 19 сервокамеры 20. Если же клапан 15 закрыт, то связь между вакуумным ресивером и полостью 19 сервокамеры прерывается. В случае подключения к источнику питания электромагнита 18 открывается приводимый им воздушный клапан 17, что приводит к соединению полости 19 сервокамеры с атмосферой. При закрытом клапане 17 эта связь прерывается.
Таким образом, при открытии клапана 15 увеличивается разрежение в полости 19 сервокамеры, а при открытии клапана 17, наоборот, уменьшается. Когда оба клапана закрыты, разрежение в полости 19 остается неизменным.
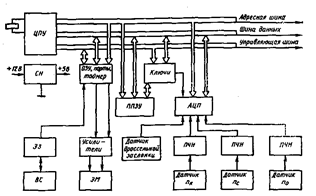
Структурная схема микропроцессорной системы управления сцеплением
В зависимости от разрежения в полости 19. сервокамеры меняется положение ее штока 21, и соответственно регулируется момент Мс, передаваемый сцеплением. Из рассмотрения зависимости Мс от перемещения L рычага привода сцепления (рисунке 3) следует, что момент Мс изменяется от нуля до значения Мс тах при перемещении рычага на 13 мм (полный ход рычага составляет 46 мм). Это учитывается алгоритмом системы управления.
Работой клапанов 15 и 17 (рисунок 2) управляет микропроцессорный электронный блок 11 управления, который вырабатывает необходимые команды для включения и выключения электромагнитов 16 и 18 в зависимости от сигналов, получаемых от датчиков частоты вращения 6, 2 и 24 соответственно коленчатого вала, ведомого элемента сцепления, ведомого вала коробки передачи и датчика 8 положения дроссельной заслонки карбюратора. Команду на принудительное выключение сцепления в процессе переключения передач микропроцессорное устройство вырабатывает при поступлении к нему сигнала от выключателя 10, контакты которого замыкаются, когда водитель прикладывает усилие к рычагу переключения передач.
Обработка информации, получаемой от всех элементов системы управления, выполняется центральным микропроцессором ЦПУ типа 8085 с тактовой частотой 2,2 МГц (рисунок 4). Он связан с программируемым постоянным запоминающим устройством ППЗУ с объемом памяти 2 кбайт и оперативным запоминающим; устройством ОЗУ с объемом памяти 256 байт.
В ППЗУ записывается программа алгоритма, контакты, стандартные программы и т. д. ОЗУ используется для записи результатов промежуточных вычислений, текущих значений измеренных величин и других данных, требуемых для функционирования микропроцессорной системы.
Работа системы в реальном масштабе времени, требуемая для выдачи в определенное время команд управления и организации временных задержек, реализуется таймером. Связь между управляющими элементами системы и силовыми исполнительными устройствами (электромагнитами клапанов) осуществляется через так называемые порты ввода-вывода и усилительные каскады. ОЗУ, порты ввода-вывода и таймер выполнены в виде одной большой интегральной схемы (БИС) типа 8156.
Микропроцессоры могут обрабатывать сигналы только в виде двоичного цифрового кода. В связи с этим сигналы от датчиков частоты вращения пк коленчатого вала, частоты вращения пс ведомого вала сцепления и частоты вращения nп ведомого вала. коробки передач, имеющие вид последовательности импульсов, вначале с помощью ПЧН преобразуются в аналоговый сигнал (напряжения постоянного тока соответственно UK, Uc, Ua), а затем с помощью АЦП преобразуются в двоичный код. Также с помощью АЦП осуществляется преобразование аналогового сигнала датчика положения дроссельной заслонки (потенциометра) в цифровой двоичный код. Работой АЦП и ППЗУ управляют ключевые элементы, входящие в микросхему типа 8212.
Для исключения нечеткой работы системы управления в режиме принудительного выключения сцепления, возможной при «дребезге» контактов выключателя ВС сцепления, используется устройство с элементом задержки разрыва цепи ЭЗ.
Выбор тормоза
Рис. Расчетная схема тормоза. Момент статического сопротивления на валу двигателя при торможении механизма определяется: , (2.17) где - общее передаточное число между тормозным валом и валом барабана, По правилам Госгортехнадзора момент, создаваемый тормозом, выбирается из условия: , (2.18) где - к ...
Выбор оборудования приспособления и инструмента
Для правки центров выбираем токарный - винторезный станок 1к62. Для шлифования шейки вала под подшипник применяем кругло шлифовальный станок 3б151. Приспособление для наплавки - наплавочная головка УАНЖ - 5. Инструмент режущий переменяется с пластинками, из быстро режущей стали Р18 и твердого сплав ...
Определение потребного количества погрузочно-разгрузочных машин
Определим время цикла операции по формуле: Где =39с - время застропки груза [6]; =23 - время отстропки контейнера [6]; - установка ковша (захвата) в транспортное положение, принимается исходя из опыта эксплуатации =3-5с; - время наклона рамы грузоподъемника при заполнении ковша, принимается исходя ...


