
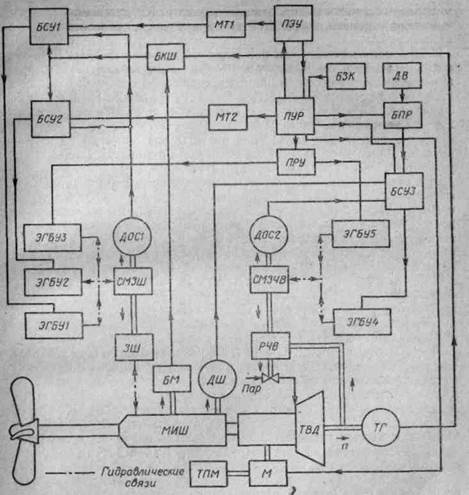
Рис. 7. Схема ДАУ комплекса двигатель —ВРШ турбохода «Кубань»
В схеме предусмотрено ДАУ ВРШ и ГТЗА с главного поста управления (ГПУ) рулевой рубки судна или из ЦПУ машинного отделения, а в случае отказа ДАУ или при пуске ГТЗА из холодного состояния — раздельное дистанционное управление ВРШ и ГТЗА с пульта резервного управления ПРУ из ЦПУ.
При работе ДВС на ВРШ установка регулятора, включенного по всережимной схеме, обязательна, так как скоростной режим судна меняется не только изменением частоты вращения ВРШ, но и изменением угла разворота его лопастей. С уменьшением шага винтовые характеристики становятся пологими, нагрузка уменьшается и становится минимальной при нулевом развороте лопастей ВРШ, а регулятор поддерживает заданную частоту вращения в пределах неравномерности АСР.
В АСР дизель-генераторов устанавливают однорежимные регуляторы, обеспечивающие поддержание заданной частоты вращения вала и частоты тока в электрической сети в пределах допускаемой статической неравномерности, а включают их в работу по всережимной схеме.
Видом потребителя механической энергии и требованиями, предъявляемыми к качеству его работы, определяются требования к точности поддержания частоты вращения вала ДВС. Согласно. ГОСТ 10511—72 АСР с регуляторами прямого и непрямого действия делятся по точности на четыре класса.
Первый класс точности АСР обеспечивается однорежимпыми. регуляторами двухимпульсными (ОРД), устанавливаемыми на ДГ переменного тока с повышенными требованиями к качеству регулирования. На транспортных судах ОРД распространения пока не получили.
На ДГ судовых электростанций устанавливаются одноимпульс-ные однорежимные регуляторы непрямого действия (ОРН), обеспечивающие 2-й и 3-й классы точности АСР, либо однорежимные регуляторы прямого действия (ОРП), обеспечивающие 3-й и 4-й класс, точности АСР. Для каждого класса точности АСР установлены предельные значения динамического заброса частоты вращения от начальных значений по на установившемся режиме и длительности переходного процесса Тпп при полном мгновенном сбросе или увеличении нагрузки, а также нестабильности частоты вращения v.
Регуляторы ОРП и ОРН должны обеспечивать возможность установки степени неравномерности АСР в пределах не уже 2—4%.
АСР ГД с всережимными регуляторами непрямого (ВРН) и прямого (ВРП) действия должны обеспечивать динамический заброс частоты вращения не более 18% и длительность переходного процесса не более 10 с при мгновенном сбросе нагрузки. Нестабильность АСР при номинальной уставке задания ВРН или ВРП (т. е. при работе АСР по номинальной регуляторной характеристике) должна отвечать требованиям 3-го и 4-го классов точности, а степень неравномерности АСР не должна превышать 12%. Эти же требования предъявляются к АСР Регистром.
Судовые холодильные установки, их классификация по принципу работы и холодильному агенту. Определить холопроизводительность установки.
Рассмотрим назначение, холодильных установок на судах различного типа.
Передвижной гаражный подъемник
Передвижной гаражный подъемник разработан в 1982 г. группой конструкторов: Кулиным А.И., Домрачевым Г.В., Пылаевым И.А., Рудаковым Г.И., содержит подвижную раму, на которой установлены поворотные рычаги, соединенные с грузонесущей головкой и силовой гидроцилиндр, корпус которого шарнирно закреплен ...
Характеристика и анализ работы объекта проектирования
Автотранспортный цех расположен на территории ОАО АПК «Кушвинский щебзавод». Автотранспортный цех (АТЦ) предназначен для поддержания всего подвижного состава в исправном состоянии. Для этого на данном участке проводится текущий ремонт и техническое обслуживание автомобилей. Техническое обслуживание ...
Основные виды дорожно-транспортных происшествий
1. Столкновение - происшествие, при котором движущиеся транспортные средства столкнулись между собой или с подвижным составом железных дорог. 2. К этому виду относятся столкновения с внезапно остановившимся транспортным средством (перед светофором, при заторе движения или из-за технической неисправ ...


