
Механизм поворота предназначен для вращения поворотной части крана вокруг вертикальной оси (рис. 2.5)

Рис. 2.4. Кинематическая схема механизма поворота:
1-электродвиатель; 4-тормоз; 6-редуктор; 10-выходная шестерня.
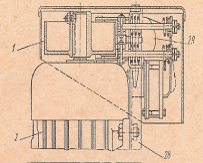
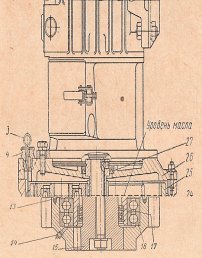
Рис. 2.4.Механизм поворота П-3:
1- шкив; 2- электродвигатель; 3- масломерный щуп; 4- пробка; 5,6,9- сателлиты; 7,11,24- водила II,III,I ступеней; 8- упорный подшипник; 10- корпус редуктора;
12- пробка сливная; 13,17,27- манжетные уплотнения; 14- масленка; 15- вал выходной; 16- шарикоподшипники; 18- шестерня выходная; 19- штифты;
20- зубчатый венец III ступени; 21,23- зубчатые кольца; 22,25- венцы II,I ступени; 26- крышка редуктора; 28- основание тормоза; 29- тормоз.
Механизм поворота П-3 предназначен для кранов большей грузоподъемности.
Он имеет вертикально расположенный фланцевый электродвигатель 2 и вертикальный планетарный редуктор. На верхнем валу электродвигателя расположен тормозной шкив 1 ,а на лапах- рамка 28 основания тормоза 29.
Редуктор состоит из корпуса 10 и крышки 26. Крышка в виде фланца соединяет электродвигатель с редуктором. Корпус отлит из стали и имеет снаружи массивную проушину и фланец для крепления к поворотной платформе крана.
На нижней шейке корпуса, опираясь на 2 подшипника 16, крепиться выходная шестерня 18, входящая в зацепление с опорно-поворотным кругом. Такое крепление разгружает тихоходный вал 15 от изгибающих радиальных нагрузок.
Планетарная передача состоит из трех ступеней. Венец 20 III ступени соединен с корпусом редуктора штифтами 19, а 2 других зафиксированы зубчатыми кольцами 21 и 23. Венцы I и II ступени выполнены самоустанавливающимися, т.е. имеются зазоры между внешней поверхностью венцов и корпусом редуктора. Это позволяет выровнять нагрузки на сателлиты независимо от наличия небольших погрешностей при изготовлении. В отличие от обычных тормозов каждая колодка тормоза отжимается своим электромагнитом, расположенным в нормальном, т.е. вертикальном положении. Такая конструкция позволяет повысить плавность разгона и торможения механизма, т.к. колодки отжимаются от шкива и накладываются в зависимости от положения рукоятки командоконтроллера механизма поворота.
грузоподъемный машина башенный кран
Определение мощности двигателя автомобиля
В основу расчета кладется номинальная грузоподъемность автомобиля mг в кг или автопоезда ma. Мощность двигателя Nv, необходимая для движения полностью груженого автомобиля со скоростью Vmax в заданных дорожных условиях, характеризующих приведенным сопротивлением дороги ψ, определяется из завис ...
Анализ объекта контроля
По заданию объектом контроля является вал редуктора ТРКП пассажирского вагона (рисунок 1.1). Рисунок 1.1 – вал редуктора ТРКП вал редуктора ТРКП пассажирского вагона изготавливается методом поперечно-винтового проката и представляет собой ступенчатый вал. Шероховатость контролируемой поверхности Rа ...
Расчет количества основного оборудования на участке
Число основного технологического оборудования для слесарно-механического участка рассчитывается по формуле: где: – действительный годовой фонд времени технологического оборудования, ч. = 2025 ч [Л-5, Приложение 8]; Таким образом, число основного технологического оборудования составит: Из общего чис ...


