
Принцип действия:
При постановке рукоятки в ту или другую позицию происходит замыкание одних и размыкание других контакторов в соответствии с диаграммой замыканий, показанной на рис. 3, 4 и 5.
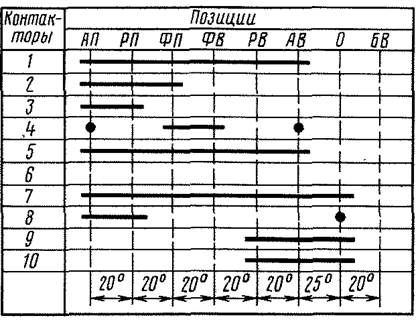
Рис.3. Диаграмма замыканий контакторов главного вала КМЭ
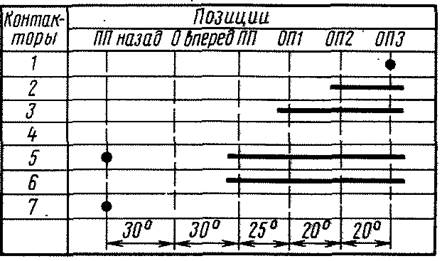
Рис.4. Диаграмма замыканий контакторов реверсивного вала КМЭ
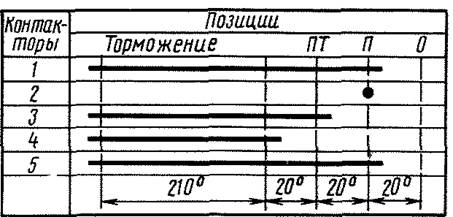
Рис.5 Диаграмма замыканий контакторов тормозного вала КМЭ
Позиции рукоятки 3 (рис. 6) главного переключателя, рукоятки 4 реверсивного и рукоятки 2 тормозного переключателя указаны на шкалах, укрепленных на контроллере. Расположение позиций неслучайно. Оно имеет определенный, логический смысл и закономерность. Любое изменение позиций (например, перестановка местами РП и АП) исключило бы возможность управления электровозом.
Главный переключатель контроллера служит для управления тяговым режимом электровоза. Он имеет следующие позиции: 0—нулевая; АВ—автоматическое выключение; РВ—ручное выключение; ФВ—фиксация выключения; ФП—фиксация пуска; РП— ручной пуск; АП—автоматический пуск; БВ—быстрое выключение. Позиции АП и БВ не фиксированные, с самовозвратом рукоятки. Остальные позиции - фиксированные.
Кулачковый вал реверсивного переключателя установлен соосно с валом главного переключателя. Реверсивный переключатель служит для управления реверсорами, осуществляющими изменение![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() направления движения (вперед или назад), а также для регулирования ослабления возбуждения тяговых двигателей. Он имеет следующие фиксированные позиции: 0 - нулевая, ПП - вперед; ОП1, ОП2, ОПЗ (соответственно 1, 2 и 3-я ступени ослабления возбуждения); ПП - назад. Все позиции реверсивного переключателя — фиксированные.
направления движения (вперед или назад), а также для регулирования ослабления возбуждения тяговых двигателей. Он имеет следующие фиксированные позиции: 0 - нулевая, ПП - вперед; ОП1, ОП2, ОПЗ (соответственно 1, 2 и 3-я ступени ослабления возбуждения); ПП - назад. Все позиции реверсивного переключателя — фиксированные.
Тормознойпереключатель предназначен для управления электровозом в режиме реостатного торможения и для плавного регулирования тока возбуждения двигателей, работающих при этом в генераторном режиме. Позиции тормозного переключателя: 0 - нулевая (на рисунке она над рукояткой); П - подготовка цепей к торможению; ПТ- предварительное торможение с тормозной силой до 120 кН; Торможение. Позиции 0, П, ПТ и крайние положения зоны «Торможение» фиксированные. Остальные позиции зоны «Торможение» нефиксированные. На валу тормозного переключателя, кроме кулачковых, установлена профильная шайба, с помощью которой производится поворот ротора сельсина. Поворот рукоятки по часовой стрелке от позиции ПТ до крайнего положения зоны торможения вызывает плавное уменьшение выход![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() ного напряжения сельсина от 24 В до нуля. На верхнем основании контроллера установлен переключатель тормозной силы ПТС (см. рис. 6, рукоятка 1). Положение его рукоятки определяет тормозную силу электровоза. Для предотвращения ошибочных действий машиниста все три групповых переключателя контроллера сблокированы специальными дисками, рычагами и пружинами. Это обеспечивает перемещения:
ного напряжения сельсина от 24 В до нуля. На верхнем основании контроллера установлен переключатель тормозной силы ПТС (см. рис. 6, рукоятка 1). Положение его рукоятки определяет тормозную силу электровоза. Для предотвращения ошибочных действий машиниста все три групповых переключателя контроллера сблокированы специальными дисками, рычагами и пружинами. Это обеспечивает перемещения:
главной рукоятки, если реверсивная не находится на позиции 0 и тормозная установлена в положение 0;
Расчет эксплуатационных показателей
- время рейса , (3.1) где -эксплуатационная скорость судна, миль/сут; (3.2) Кп=0,95-0,98 – коэффициент разрыва между технической и эксплуатационной скоростями, зависит от условий плавания; Дч- чистая грузоподъемность судна, т; Vэ1=0,95*12=11,4 миль/сут.; Vэ2=0,95*13=12,35 миль/сут.; Vэ3=0,95*14=13, ...
Механизм поворота крана
Выбор и расчет колонны. вес тали: 4,9 кН Вес поворотной части крана Тлов=mуд*Q*L mуд – удельная металлоёмкость =0,25Т/(Тм) Тлов=0,25*2,5*6=3,75 Слов=3,75*9,8=36,75 кН М4=(GT+G)(Gпов-Gт)*1,8=176,4+57,33=233,73 Диаметр колонны В качестве материала для колонны выбираем сталь 20, для которой [G]=40 при ...
Определение численности персонала занятого формированием среднего блока
Расчет численности производственных рабочих осуществляем исходя из технологических операций и трудоемкости их выполнения. Численность производственных рабочих, занятых на производственном участке, определяем по формуле: Tiгод rpi= ------------- , Вipгод Кс м где rpi – численность рабочих, i-й профе ...


