
При разработке системы управления рулем высоты (РВ), проектируемого самолета, используем полуавтоматическую систему управления. Система такого вида облегчит пилоту управление самолетом и повысит качество управления.
Полуавтоматические системы включают в себя: штурвальную колонку, отклонением которой пилот вводит в систему управляющие сигналы и осуществляет их дозировку; орган управления (РВ), отклонение которых в соответствии с управляющими сигналами (отклонением штурвальной колонки) создает необходимые для изменения траектории полета силы и моменты; проводку управления, соединяющую штурвал с органами управления.
Штурвальная колонка, показанная на рис.4.1, служит для управления рулем высоты (РВ) неманевренных самолетов (пассажирских) отклонением колонки управления "от себя" и "на себя" и элеронами – поворотом штурвала "влево-вправо".
В системе управления большую роль играет конструкция проводки. Она может быть гибкой, жесткой и смешенной.
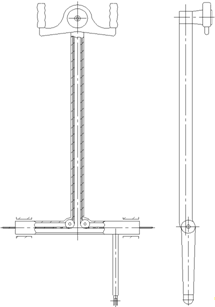
Рисунок 4.1 – Штурвальная колонка
На современных самолетах наиболее широко применяется жесткая проводка управления с поступательным движением тяг. Элементами жесткой проводки являются тяги, валы, качалки, рычаги, направляющие устройства и кронштейны.
При разработке системы управления, проектируемого самолета, будем использовать жесткую проводку, так как она имеет меньшее трение в сочленениях, не пружинит и не дает упругого люфта, что делает управление более чувствительным.
В качестве направляющих устройств для жесткой проводки управления применим направляющие, конструктивно состоящие из обоймы с четырьмя роликами.
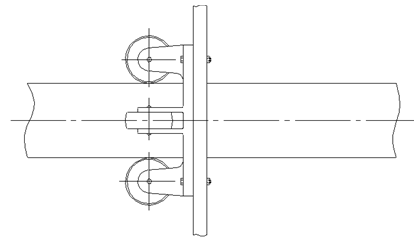
Рисунок 4.2.– Роликовые направляющие для жесткой проводки управления
Система управления бустерная с гидравлическими приводами. Гидроусилитель представляет собой гидравлическую следящую систему и состоит из исполнительного механизма, следящего элемента и связи между ними. Система обратимая, то есть большая часть шарнирного момента воспринимается гидроусилителем и некоторая доля воспринимается лётчиком.
Так же одной из наиболее важных и трудоёмких задач проектирования системы основного управления является определение его передаточных свойств, позволяющих установить требуемую взаимосвязь между перемещением командного рычага и перемещением рулевой поверхности, а также обеспечение рекомендуемых величин усилий, прикладываемых лётчиком к командному рычагу.
Учитывая выше сказанное и конструкцию самолета, составляем кинематическую схему системы управления рулем высоты.
Краткая характеристика хозяйства
Янаульская МТС расположена в северо-западной части Республики в границах Янаульского административного района. Организован согласно Постановления Совета Министров БАССР от 13.05.1967 года №115 «Об образовании Управления технологического транспорта». Почтовый адрес: 452800 Республика Башкортостан, г ...
Определение передаточного числа главной передачи
Передаточное число главной передачи определяется по выражению: ;(10) где: iKZ – передаточное число КПП на высшей передаче; (Для ЗиЛ-131 передаточное число на V передаче=1.00); iД – передаточное число в дополнительной (раздаточной) коробке(Для ЗиЛ-131 передаточное число в РК=1,00); rK – расчетный ра ...
Расчет площади и размеров склада для навалочных грузов
Хранение угля и железной руды производится на открытых складских площадках. Для каждой марки и класса груза должны устраиваться отдельные штабеля. При проектировании должны быть учтены действующие правила складирования и хранения навалочных грузов в порту, требования пожарной безопасности и произво ...


